Spatial Recognition Test
by Tuğrul Yazar | November 3, 2018 23:42
In the Digital Fabrication course, I needed to explain the plane orientation and rotation angles. This is why I prepared this Spatial Recognition Test. This is an important topic regarding the matching of the TCP (tool center point[1]) plane of the robot and the plane(s) designers generate. In Rhino, we define a construction plane by red (X), green (Y), and blue (Z) colors. The relative positions among those axes are the well-known “right-hand rule”. In mathematics and physics, the right-hand rule is a common mnemonic for understanding notation conventions for vectors in 3 dimensions. Therefore, we determine the correct direction of the axes using this rule. However, I prefer to teach this subject not by memorizing something with the right hand, but by thinking and reasoning about the visual orientations of those axes in the space. Here is the simple Spatial Recognition Test you can see below;
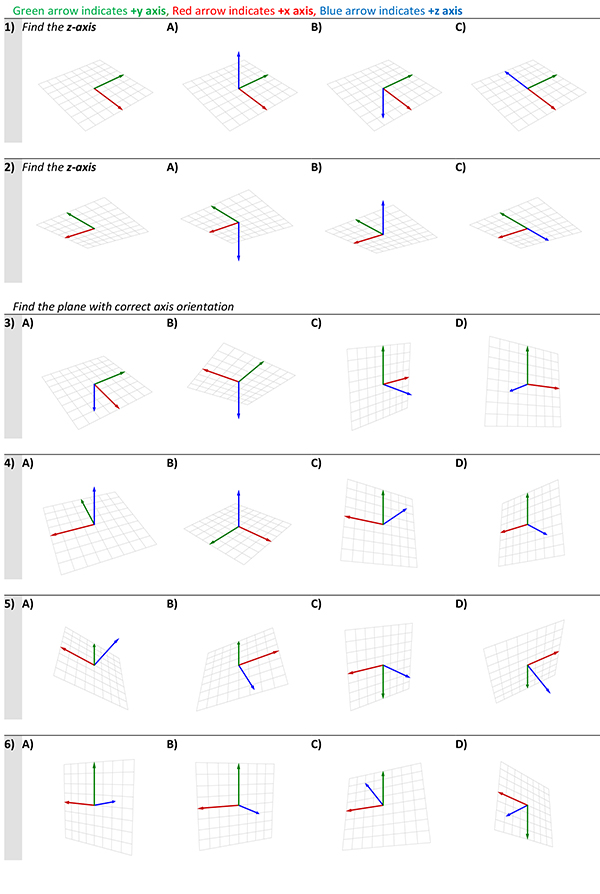
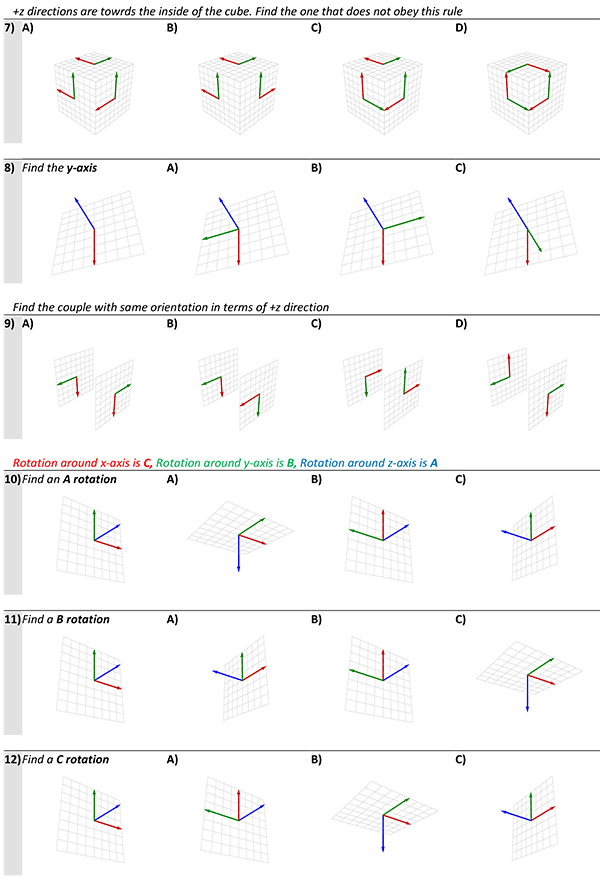
Here is the PDF version[2] of the above questions. You can see that it includes X, Y, and Z directions and A, B, and C rotations. I teach this to be implemented on our Kuka robotic arm. KUKA robots use the so-called XYZ-ABC format. Thus, XYZ is the position in millimeters, ABC is the angles in degrees, with A rotating around the z-axis, B rotating around the y-axis, and C rotating around the x-axis. I believe that these a bit old-school tests and exams are still efficient for teaching sophisticated topics.
- tool center point: https://control.com/technical-articles/how-to-define-the-tool-center-point-tcp-on-a-robot/
- Here is the PDF version: https://www.designcoding.net/decoder/wp-content/uploads/2018/11/Plane-Test.pdf
Source URL: https://www.designcoding.net/spatial-recognition-test/