Robotic Chopstick Digger
by Tuğrul Yazar | October 29, 2018 19:55
Today in the Digital Fabrication course, we examined digital-physical translations utilizing the robots add-on for Grasshopper. Students learn how to get coordinate data from a physical environment, use it in the digital model and apply it to a robot motion. We aimed to dig chopsticks into an EPS block by using a special wooden tool called “Chopstick Digger”. In the first hour of the class, we attached the “pointer” tool, which is already calibrated to the robot. Students used “Actual Position” information in the smart pad and noted the coordinates of the corner points of the EPS block. Then, every student chose one chopstick and determined the coordinates of its tip point.
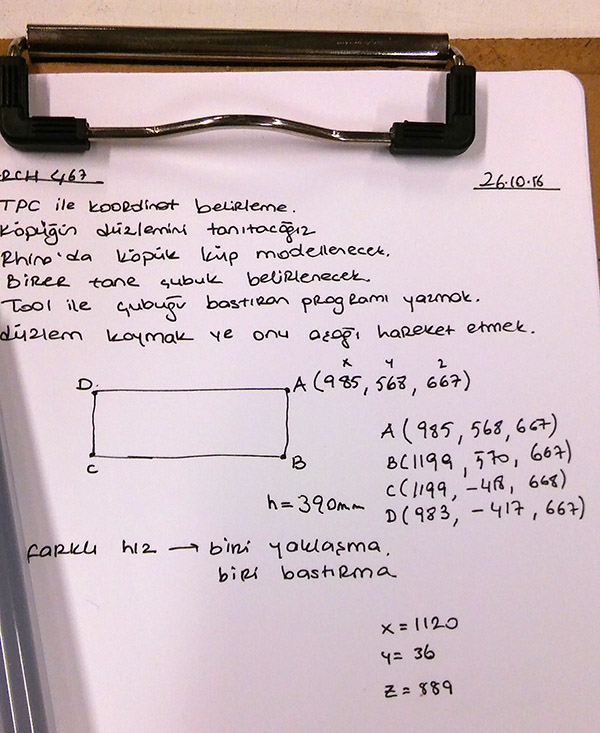

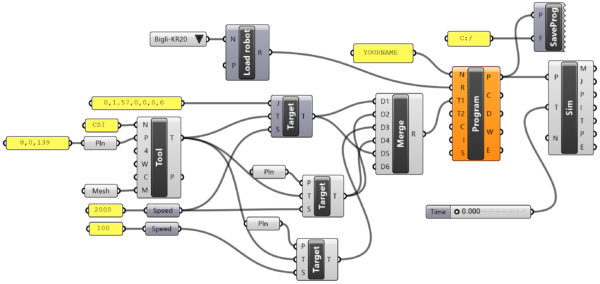
After gathering information, we went to the computer lab. where Grasshopper and robots would be utilized to use it. I gave the students a ready-made Grasshopper definition which is a basic setup of our robot. Students entered the coordinates of the EPS block and the coordinates of their chosen chopstick. Below is the code we started with:
 [1]
[1]Here are the Chopstick Digger tool Rhino 5 file and the Grasshopper definition: [Grasshopper 0.9.0076 definition][2] [Rhino 5 file][3]
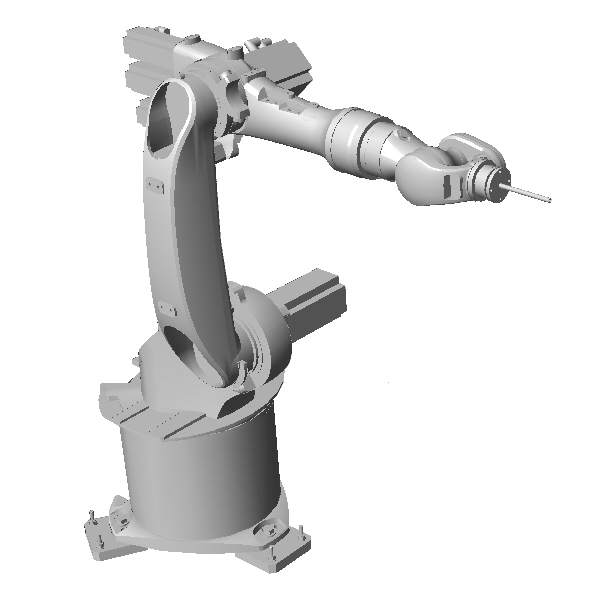
After mounting our “hi-tech” Chopstick Digger, we ran the codes generated by students to test if the translation between physical and digital spaces match. The chopstick pushing exercise was successful at the end of the third hour of today’s class. Next week, we hope to advance this exercise using more planes in Grasshopper, and more chopsticks in reality.
- [Image]: https://www.designcoding.net/decoder/wp-content/uploads/2018/10/2018_10_29-robot-code-def.jpg
- [Grasshopper 0.9.0076 definition]: https://www.designcoding.net/decoder/wp-content/uploads/2018/10/2018_10_29-code.gh
- [Rhino 5 file]: https://www.designcoding.net/decoder/wp-content/uploads/2018/10/2018_10_29-pusher.3dm
Source URL: https://www.designcoding.net/df-day5-digging-the-chopsticks/